

The intelligent technology of grab bucket overhead cranes is the core driving force behind their transformation from traditional mechanical equipment to automation, precision, and efficiency. By integrating sensors, the Internet of Things (IoT), artificial intelligence (AI), and automatic control technologies, these cranes achieve autonomous operations, visualized status monitoring, predictive maintenance, and intelligent collaboration. The key technological directions are detailed as follows:
Automated Operation and Autonomous Running
Automation is the central goal of grab bucket overhead crane intelligence, aiming to minimize human intervention and enable “unattended” or “lightly manned” operations, particularly suitable for high-risk and high-intensity scenarios (such as high-temperature steel plants and dusty mining environments).
- Automatic Positioning and Path Planning:
By using laser navigation, visual SLAM (Simultaneous Localization and Mapping), and RFID tags, the crane can precisely identify its own position (accuracy up to ±5mm) and the coordinates of target materials (such as stockpile or silo locations). Combined with obstacle-avoidance algorithms (e.g., A* algorithm, Dijkstra algorithm), the system plans the optimal motion path, avoids obstacles (such as other equipment or pillars), and reduces unnecessary travel.
- Closed-Loop Autonomous Loading and Unloading:
The grab bucket’s opening, lifting, and traveling actions are executed automatically through preset programs or real-time sensory feedback. For example, during grabbing, visual sensors recognize the shape of the stockpile and adjust the grab bucket’s cutting angle and depth. During unloading, the system controls the opening speed and angle according to the target position (such as truck beds or conveyors), preventing material spillage.
Intelligent Perception and Environmental Recognition
Through multi-dimensional sensing, the crane “perceives” the working environment and material status, providing essential data for decision-making — acting as the “eyes” and “touch” of intelligent control.
- Visual Perception:
Industrial cameras and 3D vision sensors (e.g., structured light cameras, LiDAR) capture images of material piles. Image recognition algorithms (such as deep-learning CNN models) identify material types (coal, ore, waste), pile characteristics (height, density, flatness), and boundaries, and can even detect impurities (e.g., metal blocks or oversized rocks).
- Force and Weight Sensing:
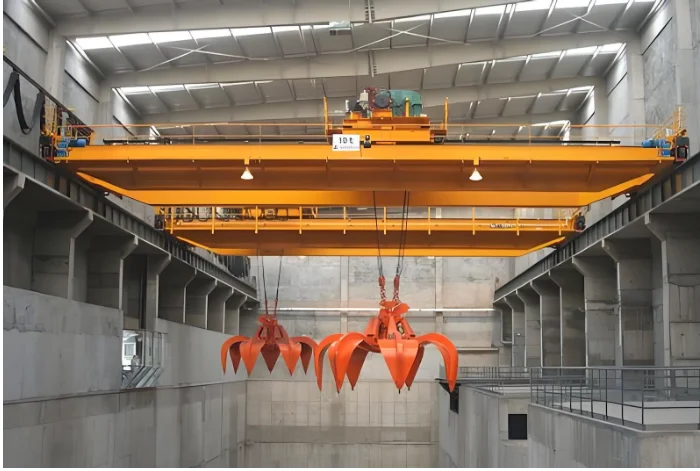
High-precision load sensors (such as strain gauge sensors) installed on the grab bucket or hoisting mechanism monitor the weight of materials in real time. By comparing with preset parameters (e.g., rated load, target grab weight), the system automatically adjusts the bucket’s closing force. For instance, when grabbing 10 tons of material, the grab bucket dynamically adjusts its closing strength based on weight feedback to prevent overload or underload — a capability highly compatible with standard 10 ton overhead crane configurations.
- Environmental Condition Sensing:
Sensors for temperature, humidity, vibration, and infrared monitoring assess both the worksite (e.g., temperature, dust concentration, wind force) and equipment status (e.g., motor temperature, bearing vibration). These inputs enable safe control and parameter adjustments — for example, reducing travel speed automatically in strong winds to prevent bucket swinging.
Precision Control and Adaptive Adjustment
Advanced control algorithms and adaptive strategies improve operational stability, positioning accuracy, and task consistency, ensuring reliable performance under complex conditions.
- Servo Drive and Precision Speed Control:
Using servo motors with variable-frequency drives, the crane achieves stepless speed control and accurate positioning for bridge travel (long travel), trolley travel (cross travel), and hoisting (vertical movement). For example, the system automatically decelerates when approaching the target, ensuring positioning error ≤10mm, preventing impact-related spillage or wear.
- Adaptive Grabbing Algorithms:
Based on different material characteristics (e.g., coal looseness, ore hardness, wet stickiness), AI models adjust the grab bucket’s closing speed, force, and angle. For instance, when handling wet coal, the algorithm prolongs closing time and increases clamping force to prevent slipping; when lifting large ore blocks, it modifies the opening angle to avoid jamming.
- Anti-Sway and Swing Stabilization Control:
Accelerometers monitor the swinging angle of the grab bucket in real time. Using PID (Proportional-Integral-Derivative) or fuzzy control algorithms, the system counter-adjusts the motion of the bridge/trolley (e.g., slight reverse movement) to suppress swinging (controlled within ±3°), especially during high-speed travel or large lifting heights.
Conclusion
The intelligent technology of grab bucket overhead cranes operates through a closed-loop system of “perception–decision–execution–collaboration.” This not only significantly improves operational efficiency (reducing manual intervention by over 50%) and precision (positioning error ≤10mm) but also enhances safety (eliminating the need for personnel in hazardous areas) and lowers maintenance costs (predictive maintenance reduces downtime by over 30%). These cranes are now widely applied in ports, mining, steel, and building materials industries, becoming an essential part of intelligent manufacturing and smart logistics.

uKnowva vs Zoho People vs Darwinbox: Best HRMS Software in India
13 Best AI Video Generators to Try in 2026 (Tested & Reviewed)

Don't Buy an iPhone Air Case Without Knowing the Returns Policy
