

Why Pneumatic Rotary Grippers Are Ideal for High-Speed Industrial Automation
In the current world of industrial automation, it is all about speed, consistency and precision. The production lines will run continuously with a high tolerance and low downtime. Robots perform thousands of repetitive tasks daily, such as picking parts and assembling goods. The efficiency of a robotic system largely depends on the way the gripping mechanism is designed in this scenario.
The rotary gripper is one of the numerous robotic end-effectors employed in automation and has proved very useful for jobs that require gripping or rotational movement. It can hold an object and spin it simultaneously; therefore, it can save several human hands, making it very handy in clean production lines and quick manufacturing industries. Among them, the pneumatically driven rotary gripper can be considered a reliable tool for industrial automation at high speeds.
It is possible to discuss compressed air, injecting it into its motion, and, in this way, achieving rapid reaction, stable gripping force, and easy alignment with automated systems, which can be used to understand the increased significance of pneumatic rotary grippers in the contemporary manufacturing setting.
What Is a Rotary Gripper?
A rotary gripper is a robotic end-effector that combines a single gripper and a rotor in a single device: gripping and rotating an object. Rotary grippers can also open and close the raptor to position the component at a given orientation, whereas standard grippers can only open and close to hold it.
It is this multitasking ability that enables robots to perform functions that would otherwise require more than one device or additional movements. A robot can, for example, take a part at one station, move it to the required position, and place it in the correct location in another machine. The rotary gripper system consists of the following parts:
- A locking device grips the workpiece.
- A rotational actuator that rotates the gripper.
- A movement regulation control system.
- Installation of robotic arm interfaces.
A combination of these components creates a flexible, rotating gripper that can perform complex handling tasks in automated manufacturing processes.
Why Is Part Orientation Important in Automation?
Most industrial processes do not require merely the transfer of a component to another. The part should also be properly placed before the subsequent operation commences. For example, one of the parts picked off a conveyor might require rotation before it can be placed into a machining or assembly station.
Robots would need additional movements or equipment to achieve the same outcome without imagination. A rotary gripper would be easy to use, as both gripping and rotation can be done within a single device. This ability enhances efficiency in a number of ways:
- It reduces the robots’ movement.
- It does not necessitate the use of other rotation stations.
- It enables parts to be positioned before placement.
Rotary grippers allow the victimization and probation functions to consolidate automated workflows.
How Does a Pneumatic Rotary Gripper Work?
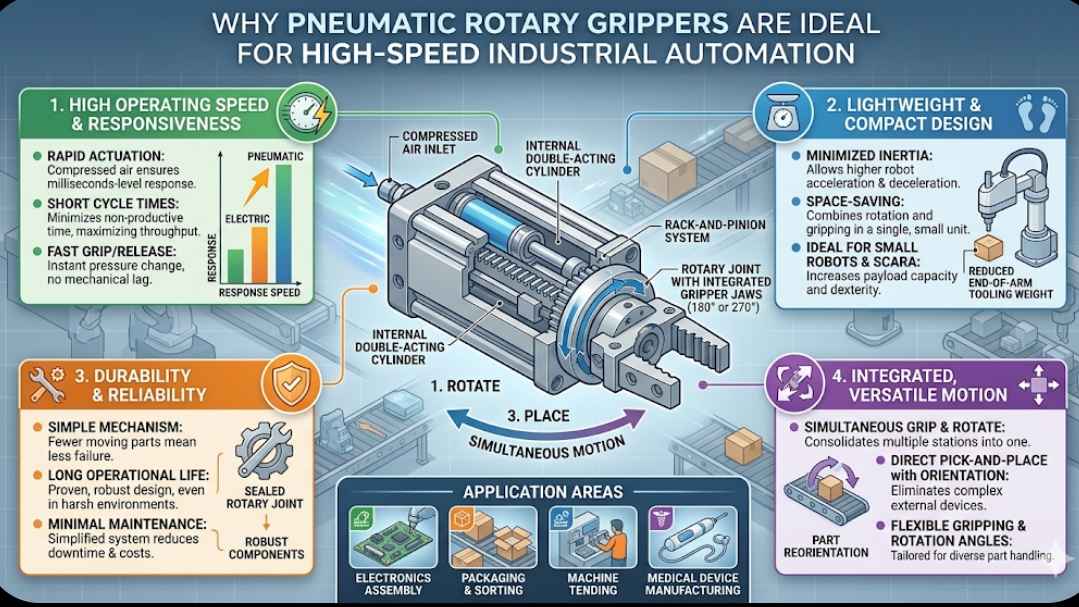
A rotary gripper that has been developed is a pneumatic rotary gripper, which relies on compressed air to provide both gripping force and rotational action. Industrial automation has seen many applications of pneumatic systems that are dependable, simple, and provide quick actuation. The operating principle of a pneumatic rotary gripper usually takes the following steps:
- The actuator chamber is fed with compressed air.
- The internal piston operates on air pressure.
- The gripping jaws are actuated by a piston that holds the part.
- The gripper is rotated to the required angle by a rotary mechanism.
After the operation is complete, the air pressure can be released, enabling the gripper to open and spin back to its initial position. Compressed air can react very rapidly, enabling pneumatic grippers to perform these tasks quickly. Hence, they can be used at high production rates.
What Is a Pneumatic Rotating Gripper?
A similar concept is the pneumatic rotating gripper, in which both gripping and rotation are driven by pneumatic systems. In most situations, the manufacturer uses rotary pneumatic gripper, pneumatic rotary gripper, or pneumatic rotating gripper interchangeably. The main capabilities of all these designs are to offer:
- Firm handling of parts.
- Gripper head rotation is controlled.
This two-fold functionality enables the robots to perform tasks effectively without the need for multiple distinct tools.
Advantages of Pneumatic Rotary Grippers in High-Speed Automation
Industrial automation systems need to be fast yet reliable. Pneumatic rotary grippers offer several benefits that make them well-suited for such environments.
- Quick actuation speed: Compressed air systems respond quickly, enabling fast gripping and rotation.
- Basic mechanical layout: Pneumatic systems have fewer complicated elements, generally, thus a lower chance of a mechanical breakdown.
- Stable gripping force: With air pressure, the gripping force used is steady and consistent throughout operation.
- Reduced size: The integration of gripping and rotation functionality reduces the robotic end-effector’s size.
Due to these advantages, the rotary pneumatic gripper has become a popular choice for fast robotic automation.
Electric Rotary Gripper vs Pneumatic Rotary Gripper
Another category of rotary gripper popular in automation is the electric rotary gripper. These machines rely on electric motors for both gripping and rotation, rather than compressed air. The two systems have benefits in terms of use.
- The rotary grippers are electric and have fine motion control and computerized positioning.
- Rotary grippers are available as pneumatic grippers, offering faster response and easier system integration.
Electric systems might require more complex electronic controls, whereas pneumatic systems tend to connect readily to existing compressed air systems. The pneumatic rotary gripper is also used in high-speed manufacturing setups that require rapid movement.
Role of Rotary Feedthrough in Rotary Gripper Systems
In some advanced automation setups, rotating grippers must maintain continuous airflow or electrical connections while rotating. This is where a rotary feedthrough becomes important.
A rotary feedthrough allows fluids, air, or signals to pass through a rotating joint without interrupting the connection. This is particularly useful when the gripper rotates multiple times or requires a constant pneumatic supply.
Using a rotary feedthrough enables the rotating gripper to operate continuously without tangling hoses or cables. This improves system reliability and allows more complex robotic movements.
Applications of Pneumatic Rotary Grippers in Industry
The pneumatic rotary gripper is widely used across many industries where automated handling and part orientation are required.
- Automotive manufacturing: Robots use rotary grippers to pick up components, rotate them to the correct orientation, and place them into assembly fixtures.
- Electronics manufacturing: Small components often need precise orientation before assembly. Rotary grippers allow robots to position themselves accurately.
- Packaging industry: Products can be picked up and rotated before being placed into packaging containers.
- Metalworking and machining: Robots use rotary grippers to load and unload parts from CNC machines.
In each of these applications, the ability of the rotary gripper to grip and rotate parts simultaneously helps improve efficiency.
How Rotary Grippers Improve Production Efficiency
Automation systems depend on the smooth and efficient movement of components between different stages of production. Rotary grippers improve production efficiency in several ways.
- They reduce the number of robot movements required to orient parts.
- They simplify the design of robotic workstations.
- They improve accuracy in part placement.
They increase production speed by combining multiple actions into one device. By enabling robots to grip and rotate parts simultaneously, the pneumatic rotating gripper helps streamline automated manufacturing processes.
Future Developments in Rotary Gripper Technology
As automation technology continues to evolve, gripper systems are also becoming more advanced. Engineers are developing new designs that combine compact size, high speed, and intelligent control. Future improvements in rotary gripper technology may include:
- Integration with smart sensors for grip detection
- Advanced lightweight materials for improved robot performance
- More precise rotational control systems
- Improved durability for continuous high-speed operations
These developments will allow rotary pneumatic grippers to perform even more complex tasks in automated production environments.
Conclusion
High-speed industrial automation requires efficient part handling. Robots should be able to retrieve parts, rotate them to the proper position, and fit them correctly in the subsequent production phase. The rotary gripper will be a convenient solution, as it allows gripping and rotation in a single piece. The pneumatic rotary gripper is one of the available options. However, it is the first choice due to its high actuation response speed, consistent performance, and ease of integration with automation systems.
Known by many names, such as a pneumatic rotating gripper, rotary pneumatic gripper or simply a rotating gripper, the technology is an important part of automated manufacturing in the modern world. Such grippers can be used in harsh industrial conditions for continuous operation, with the assistance of other technologies such as rotary feedthroughs, enabling manufacturers to maintain high productivity with lower variation in the quality of their goods.

How Smart Packaging Is Powering Consumer Electronics Growth

Partnership Taxes for International Businesses: What U.S. Partners Need to Know

How to Build a WhatsApp Chatbot That Actually Works: A Practical Guide for African Businesses
